推荐产品

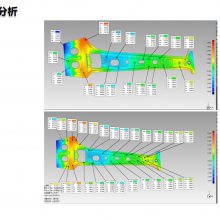
3D扫描分析是一种利用***的光学、激光或其他物理原理,对物体的三维空间形状和表面特征进行全面、高精度数据采集,并通过软件对采集的数据进行处理、分析的技术。
| 产品特性: | 检测服务 | 检测类型: | 安全质量检测 |
|---|---|---|---|
| 安全质量检测类型: | 可靠性检测 | 服务范围: | 全国 |
| 服务周期: | 3-7个工作日(可加急) | 检测依据: | 国标、地标、行标等 |
| 具备资质: | CMA、CNAS等 | 报告类型: | 电子报告、纸质报告 |
| 检测方式: | 送样检测 | 收费方式: | 按点收费 |
检测定义
3D 扫描分析是一种利用***的光学、激光或其他物理原理,对物体的三维空间形状和表面特征进行全面、高精度数据采集,并通过软件对采集的数据进行处理、分析的技术。它能够获取物体表面的点云数据(大量三维坐标点的集合),这些点云数据包含了物体的几何形状、尺寸、纹理等详细信息,进而可以构建出物体的真实三维模型,用于各种目的的分析。例如,在工业设计领域,可以对产品原型进行 3D 扫描,快速获取其***的三维形状,为后续的设计优化提供依据。
检测标准
汽车行业:对于汽车零部件的 3D 扫描分析,有严格的质量和精度标准。例如,汽车发动机关键部件的 3D 扫描模型精度要达到 ±0.05mm 甚至更高,并且在材料性能模拟等方面也有***部的规范要求。
模具行业:模具的 3D 扫描分析涉及到复杂的曲面造型和高精度尺寸要求。行业标准规定模具 3D 扫描模型的尺寸公差应根据模具的用途和精度等级确定,一般注塑模具的尺寸公差要求在 ±0.1mm 以内,精密压铸模具的要求更高。
GB/T 16656(等同采用 *** 10303):我国的产品模型数据交换标准,对于 3D 扫描分析后的数据处理环节起到关键作用,确保逆向模型数据符合国内工业生产的通用性要求。
在机械量测方面,GB/T 3505 - 2009《产品几何技术规范(GPS) 表面结构 轮廓法 术语、定义及表面结构参数》规范了 3D 扫描分析中对产品表面纹理、粗糙度等几何特征的测量和描述。
*** 10303(产品模型数据交换标准 - STEP):这是用于在不同 CAD/CAM 系统之间交换产品数据的***。在 3D 扫描分析中,采集到的数据需要按照这个标准进行处理和存储,以确保数据能够在不同软件平台之间准确传递和共享。例如,扫描得到的汽车零部件 3D 模型数据,若要与其他企业的制造系统协作,STEP 标准***了数据兼容性。
*** 5436 - 1:规定了表面结构的测量方法和仪器校准等相关内容。对于 3D 扫描涉及的表面粗糙度、轮廓等测量部分,需要遵循此标准,确保测量数据的准确性和可靠性。
***
***
行业标准
检测目的
为文化遗产保护提供数字化存档手段。例如,对古建筑、文物进行 3D 扫描,建立数字模型,***保存其三维形态和细节信息,同时可以用于虚拟展示,让更多人能够欣赏文物。
在商业领域,3D 扫描产品后进行虚拟展示,方便客户在购买前进行全方位查看。如在家具销售中,客户可以通过线上 3D 模型查看家具的外观和尺寸,提高购物体验。
当无法获取产品的原始设计图纸或技术资料时,3D 扫描分析是逆向工程的关键步骤。例如,对于一些已经停产但市场仍有需求的机械零件,通过 3D 扫描获取其几何形状,重建模型,用于生产制造替换零件。
在知识产权允许的情况下,对竞争对手的产品进行 3D 扫描分析,仿制产品或改进自身产品。例如,在体育用品行业,扫描分析高端运动装备的 3D 结构,用于开发类似但更具性价比的产品。
对生产过程中的产品进行 3D 扫描,与标准的设计模型进行比对,检测尺寸偏差、形状误差等质量问题。例如,在航空航天零部件制造中,3D 扫描分析可***检测零件的加工精度,确保每个零件都符合严格的质量标准。
可以对产品表面质量进行检测,如表面粗糙度、纹理等。在汽车制造中,通过 3D 扫描分析车身表面,检查涂装质量和表面平整度。
在产品设计初期,通过 3D 扫描分析现有产品或竞争对手的产品,可以获取灵感和设计参考。例如,扫描分析市场上流行的电子产品外观,了解其人体工程学设计和美学特点,为自己的新产品设计提供思路。
对于产品原型,3D 扫描可以快速获取其实际形状和尺寸,与设计模型对比,发现设计缺陷,进行优化。例如,在机械产品开发中,扫描机械部件原型,分析其装配干涉情况和结构强度薄弱点,优化设计方案。
产品设计与优化
质量检测与控制
逆向工程与仿制
虚拟展示与数字化存档
检测方法
点云滤波:采集到的点云数据中往往包含噪声点,需要进行滤波处理以去除噪声。常见的滤波方法有均值滤波、中值滤波、高斯滤波等。这些方法可以根据点云数据的特点和应用需求进行选择。
点云配准:当对物体进行多次扫描或从不同角度进行扫描时,需要将多个点云数据进行配准,统一到一个坐标系下。点云配准的方法有基于特征的配准和基于迭代最近点(ICP)算法的配准。基于特征的配准首先提取点云数据中的特征点,然后通过匹配特征点来实现点云的配准;ICP 算法则是通过不断迭代计算两个点云之间的***变换矩阵,使得两个点云之间的距离最小化。
曲面重建与模型生成:利用滤波和配准后的点云数据进行曲面重建,生成三维模型。常用的曲面重建方法有基于三角面片的重建方法和基于参数曲面的重建方法。基于三角面片的方法简单快速,适用于形状复杂但精度要求不是特别高的模型;基于参数曲面的方法可以生成更光滑、精度更高的曲面,但计算复杂,常用于高精度的产品 3D 扫描分析。
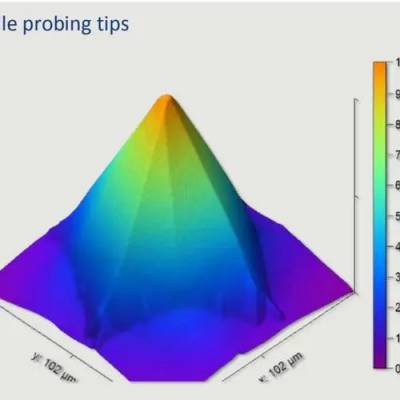
三坐标测量机(CMM)扫描法:
原理:通过测量探头在三维空间中的位置来获取物体表面的坐标点。在测量时,探头接触物体表面,按照预定的测量路径和点间距进行测量。
设备:三坐标测量机主要包括测量平台、测量探头、运动控制系统和数据处理系统。
操作:将被测物体固定在测量机的工作台上,设定测量参数,如测量路径、点间距、扫描速度等。启动扫描后,探头接触物体表面进行扫描,获取点云数据。其优点是测量精度高,能够达到微米级甚至更高精度,适用于各种形状复杂、精度要求高的零部件测量。
激光扫描法:
结构光扫描法:
原理:通过发射激光束并测量反射光的时间或相位差来确定物体表面点的位置。根据测量原理的不同,激光扫描仪可以分为脉冲式激光扫描仪和相位式激光扫描仪。脉冲式激光扫描仪适用于远距离、大面积的测量,精度相对较低;相位式激光扫描仪则具有更高的精度,适用于近距离、高精度的测量。
设备:常见的激光 3D 扫描仪,其组成包括激光发射器、接收器、扫描系统、控制单元和数据处理软件等。
操作:将被测物体放置在扫描仪的有效测量范围内,启动扫描程序。扫描仪按照预设的扫描路径和参数,发射激光束并接收反射光,计算物体表面点的坐标,生成点云数据。
原理:利用投影仪将特定的光图案(如条纹光)投射到物体表面,然后通过相机拍摄物体表面的变形图案,根据图案的变形情况计算物体表面点的三维坐标。
设备:主要由投影仪、相机、计算机和配套软件组成。
操作:将物体置于扫描区域,投影仪投射光图案到物体表面,相机同步拍摄。软件根据拍摄的图像和预设的算法计算点云数据。这种方法具有测量速度快、精度较高的优点,适用于对物体表面颜色和纹理丰富的情况进行测量。
光学扫描方法
接触式扫描方法
数据处理与分析方法
判定标准
根据产品的功能和应用需求,对 3D 扫描模型的表面质量进行判定。例如,对于需要高精度光学反射的产品表面,其粗糙度和纹理要求非常严格;对于需要良好密封性能的表面,表面的平整度和微观缺陷情况是判定的关键因素。可以通过比较扫描得到的表面粗糙度数据与设计要求,或者观察表面纹理的均匀性等来判定表面质量是否合格。
检查 3D 扫描分析得到的模型是否完整地表达了原始产品的所有几何特征。包括内部结构、表面细节(如纹理、刻字等)和功能特征(如产品的装配孔、连接部位等)。如果模型缺少重要的几何特征,如在电子产品 3D 扫描分析中遗漏了电路板的安装卡槽,那么判定模型不完整。
对于一些具有复杂内部结构的产品,如发动机缸体,需要通过工业 CT 等手段确保 3D 扫描模型完整地反映了内部结构的形状、尺寸和位置关系等信息。
比较 3D 扫描模型的尺寸与原始设计尺寸或标准尺寸。对于关键尺寸(如零件的孔径、轴径、厚度等),其偏差应在规定的公差范围内。例如,在模具 3D 扫描分析中,型腔尺寸的偏差要求控制在 ±0.05mm 以内,若超出这个范围,则判定尺寸精度不符合要求。
尺寸精度判定还需要考虑尺寸链的影响。在一个产品中,各个零件的尺寸相互关联,通过尺寸链分析确保 3D 扫描模型的尺寸组合不会导致装配问题或功能障碍。
根据 3D 扫描重建模型与原始产品或设计模型之间的形状偏差来判定。通常使用均方根误差(RMSE)、偏差等参数来衡量形状精度。例如,在机械零件的 3D 扫描分析中,如果 RMSE 小于设计要求的公差范围(如 ±0.1mm),则认为形状精度符合要求。
对于一些具有复杂曲面的产品,如汽车外观件,除了整体形状精度外,还需要考虑曲面的光顺性。通过计算曲面的曲率变化等参数,判断曲面是否光滑连续,若出现局部曲率突变等不符合设计要求的情况,则判定为形状精度不合格。
形状精度判定
尺寸精度判定
模型完整性判定
表面质量判定

我公司长期提供【贵州省 量测3D扫描分析在哪里找检测机构 费用多少】,如果您对我们的【贵州省 量测3D扫描分析在哪里找检测机构 费用多少】感兴趣,请随时拨打下方的电话,点击留言或QQ与我交谈。联系我时,请说明是在供应商网上看到的,谢谢!
| 联系人 | 张先生 |
|---|---|
| 电话 | 19150041675 |
| 手机 | 𐀊𐀋𐀊𐀍𐀎𐀋𐀍𐀏𐀐 |